Uma segunda pessoa que falou sobre problemas na Boeing morreu inesperadamente. Joshua Dean, 45 anos, adoeceu há duas semanas e teve dificuldade para respirar. Ele visitou o médico e foi diagnosticado com pneumonia e uma infecção bacteriana chamada MRSA. Ele faleceu em 30 de abril de 2024. Dean foi supostamente demitido em retaliação por sinalizar padrões frouxos na fábrica da empresa em Wichita, Kansas. Ele acusou um fornecedor da Boeing de ignorar defeitos na produção do 737 MAX. Joshua Dean foi uma das primeiras pessoas a relatar problemas com uma empresa que fornece peças para a Boeing, chamada Spirit AeroSystems. Ele perdeu o emprego em abril de 2023. Duas semanas atrás, ele teve dificuldade para respirar e teve que ir ao hospital. Sua saúde piorou, e ele precisou de uma máquina para ajudá-lo a respirar. Ele também pegou pneumonia e uma infecção bacteriana grave chamada MRSA. Os médicos descobriram que ele também teve um derrame. Dean tinha os mesmos advogados de outra pessoa...
Gerar link
Facebook
X
Pinterest
E-mail
Outros aplicativos
O alerta do “lado negro da IA” de Jordan Peterson está se tornando realidade: gigantes virão à Terra novamente, e nós testemunharemos isso, se ainda estivermos vivos
O tempo acelerou tremendamente. Em dezembro, o prof. Jordan Peterson deu uma ótima entrevista a Lord Conrad Blake, onde Peterson tocou em muitos tópicos. Entre elas e a exemplo do ChatGPT, que então acabava de surgir, está a questão do “lado negro da IA” .
Peterson alertou sobre o seguinte.
_____________________
“Esteja preparado para coisas que surgirão na frente da IA no próximo ano e que deixarão seus cabelos em pé.
Agora já existe uma IA capaz de criar sua própria imagem do mundo apenas com base na análise de um colossal corpus de textos. E essa IA já é mais inteligente do que muitos de nós. Mas em um ano ele se tornará incomparavelmente mais inteligente do que a maioria de nós. Pois ela construirá sua imagem do mundo a partir de trilhões de padrões, extraídos não apenas dos textos das pessoas, mas também do próprio mundo (suas imagens visuais e outras). O conhecimento que está no centro da sua visão do mundo não virá apenas das estatísticas linguísticas dos textos que descrevem esse mundo (como o ChatGPT tem atualmente). Mas também das estatísticas dos padrões de formação e dinâmica das interações dos objetos neste mundo. Portanto, mantenham seus chapéus, senhoras e senhores. Como disse Jonathan Pajo, “gigantes virão à Terra novamente, e podemos vê-los, se vivermos”.
_____________________
Menos de três meses depois, como alerta o prof. Peterson começou a se tornar realidade.
Um grupo de pesquisadores de inteligência artificial do Google e da Universidade Técnica de Berlim apresentou o primeiro passo para o que Peterson estava falando:
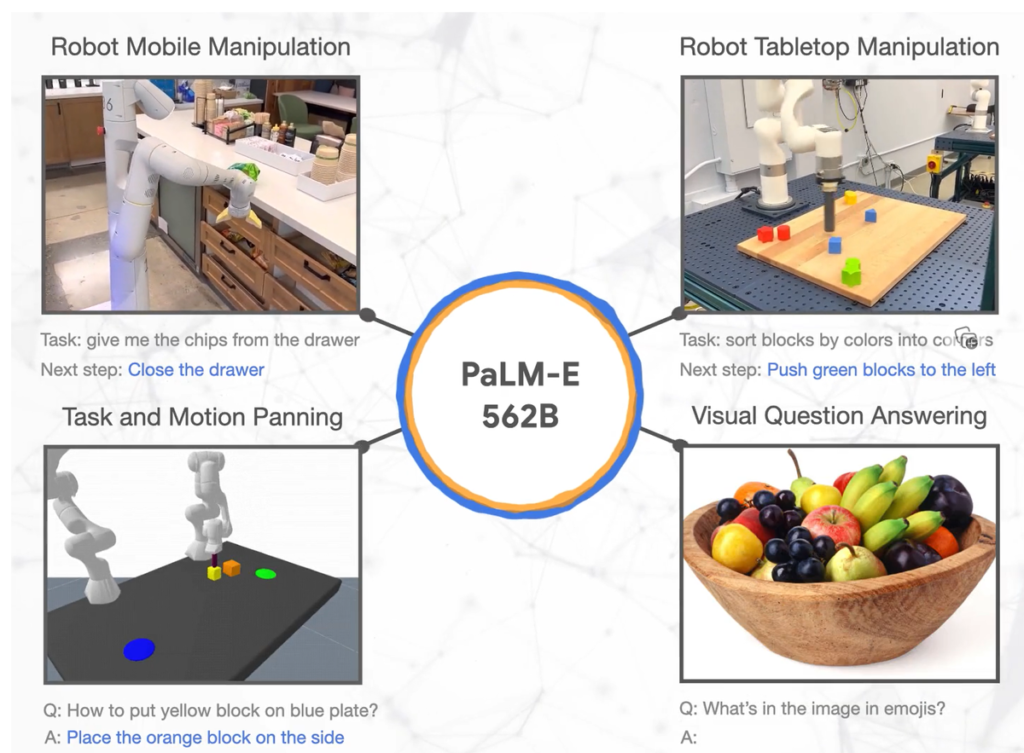
Dado o comando “traga-me alguns chips de arroz da gaveta da cozinha”, o PaLM-E pode gerar um plano de ação para uma plataforma robótica móvel com braço mecânico (desenvolvido pela Google Robotics) e executar todo o conjunto de ações geradas.
O PaLM-E faz isso analisando os dados da câmera do robô sem exigir uma representação pré-renderizada da cena. Isso elimina a necessidade de pré-processamento ou anotação humana e permite que o robô trabalhe de forma autônoma.
PaLM-E é um preditor do próximo token. É assim chamado porque é baseado no Large Language Model (LLM) do Google chamado “PaLM”, semelhante à tecnologia por trás do ChatGPT.
_____________________
Mas o Google tornou o PaLM “realista” adicionando informações sensoriais e controle robótico.
Como é baseado em um modelo de linguagem, o PaLM-E coleta continuamente observações como imagens ou dados de sensores e os codifica em uma sequência de vetores do mesmo tamanho que os tokens de linguagem. Isso permite que o modelo “entenda” as informações sensoriais da mesma forma que processa a linguagem.
O novo modelo demonstra habilidades interessantes e inesperadas.
Por exemplo, exibe “transferência positiva”, o que significa que pode transferir o conhecimento e as habilidades que aprendeu de uma tarefa para outra, resultando em desempenho significativamente maior em comparação com modelos de robôs de tarefa única.
Além disso, o modelo exibe cadeias de raciocínio multimodais (permitindo que o modelo analise uma sequência de entradas que incluem informações linguísticas e visuais) e inferência multiimagem (usando várias imagens como entrada para fazer uma conclusão ou previsão), embora o modelo foi treinado apenas em prompts de imagem única.
Peterson estava certo. Mantenham seus chapéus, senhoras e senhores. Pois os gigantes já estão se aproximando.
E não esqueça: nossa página principal é atualizada diariamente, com novos artigos podendo ser publicados ao longo do dia. Clique aqui.
PARTICIPE DOS COMENTÁRIOS MAIS ABAIXO…
GALERA AJUDA O BLOG COM UM PIX QUAL QUER VALOR É BEM VINDO (0,50.1 REAL, 2 REAIS ,3 REAIS ,5 REAIS... )
Os comentários são de responsabilidade única e exclusiva de cada pessoa que comenta. FRONTEIRAS X não se responsabiliza por transtornos, rixas ou quaisquer outras indisposições causadas pelos comentários.
Comente educadamente e com ética, sempre tratando seu colega de comentários como você mesmo/a queira ser tratado/a.
Um canal de televisão nos Estados Unidos capturou ao vivo a suposta e "estranha transformação do general Petraeus em reptiliano". As imagens geraram muita polêmica, aumentando o debate sobre "quem nos governa". Culturas antigas , como a suméria e a asteca, mencionavam deuses com aparência humanóide e reptiliana que governaram o mundo no passado remoto. Esses deuses vieram do céu e criaram a humanidade como a conhecemos. De acordo com a teoria dos Antigos Astronautas, essas criaturas vieram de civilizações extraterrestres muito avançadas. Esses seres inteligentes continuariam a governar o mundo nas sombras, alguns se camuflando entre nós com aparência humana. O estranho evento aconteceu na televisão "ao vivo". Embora essa teoria tenha seus detratores, um estranho acontecimento foi visto ao vivo na televisão americana. O general David Petraeus exibiu um comportamento estranho...
Phil Schneider Phil Schneider, geólogo e engenheiro do governo com mais de 17 anos de experiência trabalhando em “projetos negros”, é sem dúvida um dos mais importantes denunciantes da história moderna. Em setembro de 1995, o Sr. Schneider fez uma apresentação na Preparedness Expo, na qual expôs a Agenda da Nova Ordem Mundial e como ela se conecta com os extraterrestres. Durante este discurso, ele apresentou evidências físicas de metais e artefatos alienígenas, juntamente com fotografias adicionais para validar suas afirmações Menos de seis meses depois de fazer esta apresentação, ele foi encontrado morto em seu apartamento com uma corda de piano enrolada em seu pescoço, o que muitos classificaria como uma execução de estilo militar. Phil Schneider De acordo com algumas pessoas próximas à investigação, o Sr. Schneider foi repetidamente e brutalmente torturado antes de ser morto. Apesar disso, as autoridades de alguma forma consideraram sua morte um suicídio. Phil conti...
Algo incrível foi descoberto em uma das regiões da África do Sul. São os restos de uma grande metrópole, cuja área, para padrões modestos, é de cerca de 1.500 quilômetros quadrados. Eles sempre estiveram lá, as pessoas os notaram antes, mas ninguém conseguia se lembrar quem os fez e por quê. Até recentemente, ninguém sabia quantos eram, agora estão por toda parte, são milhares; não, centenas de milhares! A história que contam é a história mais importante da humanidade, mas que eles não querem ouvir. A metrópole Anunnaki faz parte de uma comunidade ainda maior de quase 10.000 quilômetros quadrados e parece ter sido construída entre 160.000 e 200.000 aC! Isso mudou quando o explorador e escritor Michael Tellinger se juntou a Johan Heine, um bombeiro e piloto local que sobrevoou a região durante anos, observando as ruínas. Heine tinha uma vantagem única: ele viu o número e o alcance dessas estranhas fundações de pedra e sabia sua importância. Michael Tel...
A lua é um satélite da Terra, e o único objeto astronômico conhecido até hoje, onde o pé de uma pessoa pisou. A lua misteriosa está repleta de muitos mistérios e hipóteses incríveis. Quando olhamos para a Lua, sempre vemos o mesmo lado, cerca de 60% de sua superfície - embora o planeta gire em seu próprio eixo. Esta característica do nosso satélite se deve ao fato de que a rotação da Lua em torno de nosso planeta e em torno de seu próprio eixo é sincronizada - este é outro mistério do nosso vizinho. Freqüentemente, a parte invisível da lua é conhecida como o lado oposto da lua ou "o lado escuro da lua". Embora o “lado escuro” seja certamente uma metáfora, ao invés de um reflexo da realidade, já que em média o lado escuro da lua recebe tanta luz solar quanto a parte visível do nosso satélite. E, no entanto, é realmente o “lado escuro da lua”, um território que não foi visível para a humanidade por muitas centenas de anos. O que pode acontecer lá...
Estaria uma criatura ainda desconhecida gerando esses sons misteriosos? IMAGEM SOMENTE ILUSTRATIVA Em um artigo publicado no Journal of the American Society for Acoustic Research , os pesquisadores ouviram um estranho som semelhante a um grito na parte mais profunda da Fossa das Marianas , no Oceano Pacífico. Este “chamado” dura cerca de cinco segundos de cada vez, começando com um som super grave semelhante a um gemido e depois se transformando em um grito de frequência ultra-aguda. A Fossa das Marianas é a mais profunda já descoberta pelo homem, com uma profundidade de 10.984 metros abaixo do nível do mar. Em termos de acústica, esse som é incomum, muito parecido com o grito de uma baleia de barbatana, mas não é. Provavelmente ele é gerado por uma criatura desconhecida da humanidade. A equipe do Hatfield Marine Science Management Center acidentalmente ouviu e coletou o som estranho enquanto monitorava o som das baleias no fundo do mar na Fossa das M...
.jpg)









Comentários
Postar um comentário
CONTE-NOS SEU RELATO!